Page 205 : équation du vecteur ` (L_x, L_y ) ` tournant uniformément autour de l'origine avec une fréquence angulaire ` omega ` .
Le paragraphe en milieu de la page 205 nous indique que :
On obtient les valeurs
` dot L_x = - omega L_y ` (1)
` dot L_y = omega L_x ` (2)
Et c'est exactement l'équation d'un vecteur ` (L_x, L_y) ` dans le plan ` xOy ` tournant uniformément autour de l'origine avec la vitesse
angulaire ` omega ` (donc constante) .
Je pense que quelques explications supplémentaires permettront d'éclaircir ce paragraphe.
On peut écrire en dérivant une fois supplémentaire :
` ddot L_x = - omega dot L_y `
`color (brown) ( ddot L_x = - omega^2 L_x )` en ayant utilisé l'équation (2)
Nous avons déjà rencontré dans l'exercice 3.4 cette équation qui est dite différentielle puisqu'il y a des dérivées, et
nous avons vérifié qu'elle admet la solution
` L_x(t) = A cos(omega t) + B sin(omega t) `
Je n'ai pas remis cet exercice dans le site car la correction proposée par le MAST était très simple.
De la même manière nous allons obtenir pour la coordonnée ` y ` :
` ddot L_y = omega dot L_x `
`color (brown) ( ddot L_y = - omega^2 L_y )` en ayant utilisé l'équation (1)
ce qui donne le système :
`color (blue) ( ddot L_x = - omega^2 L_x )`
`color (blue) ( ddot L_y = - omega^2 L_y )`
et donc :
`color (blue) ( L_x(t) = A cos(omega t) + B sin(omega t) )`
`color (blue) ( L_y(t) = C cos(omega t) + D sin(omega t) )`
que nous avions rencontré dans l'exercice 5.2 .
Les paramètres suivants avaient été déterminés pour une trajectoire circulaire :
` A = D = R ` , ` B = C = 0 ` ` R ` étant la valeur du rayon du cercle.
ou
` A = D = 0 ` , ` B = C = R ` ( comme conditions symétriques)
Cet exercice 5.2 indique bien l'importance du choix des conditions initiales ainsi que leur signification.
Le système s'écrit alors si on utilise le premier ensemble de conditions :
`color (blue) ( L_x(t) = R cos(omega t) )`
`color (blue) ( L_y(t) = R sin(omega t) )`
On peut aussi avoir les conditions :
` D = -A ` , ` C = B ` ( ainsi que les valeurs symétriques )
puisque dans ce cas :
` L_x^2(t) + L_y^2(t) = A^2 + B^2 = R^2 `
et le système conduisant à une trajectoire circulaire s'écrira alors :
`color (blue) ( L_x(t) = A cos(omega t) + B sin(omega t) )`
`color (blue) ( L_y(t) = B cos(omega t) - A sin(omega t) )`
`color(blue) ( R = sqrt( A^2 + B^2 ) )`
Cette remarque s'applique aussi pour l'exercice 5.2 .
En ce qui concerne la vitesse angulaire ` omega` constante, on peut faire les remarques suivantes :
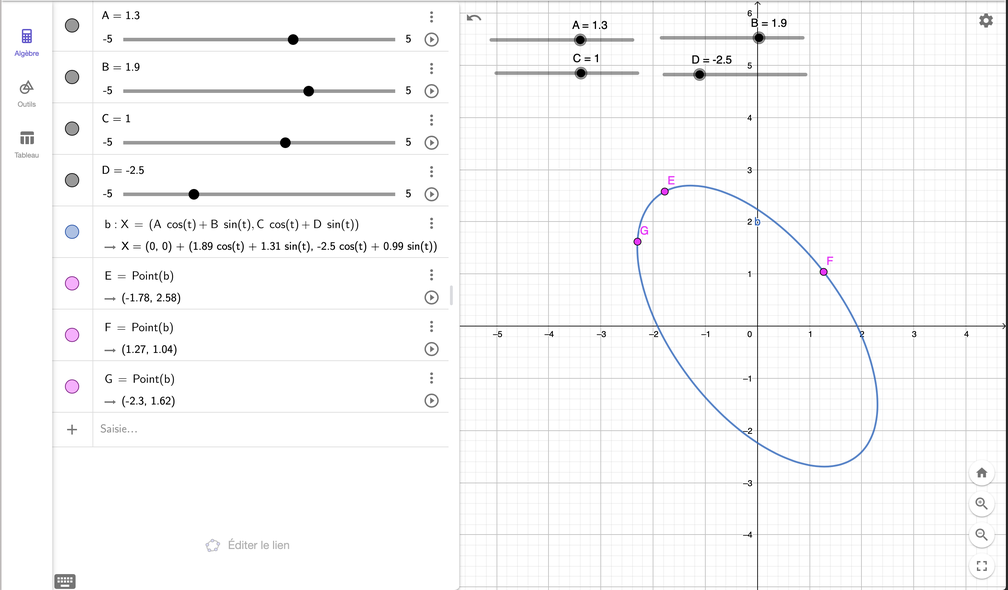
La forme générale de la trajectoire donnée par les équations :
` L_x(t) = A cos(omega t) + B sin(omega t)`
` L_y(t) = C cos(omega t) + D sin(omega t)`
est une ellipse non alignée sur un axe.
Visuellement le rayon de courbure (appelé simplement le rayon R pour un cercle) n'est pas le même pour
les différents points E, F, G de la courbe ci-dessus avec des valeurs A, B, C, D quelconques.
Et donc la vitesse angulaire ` omega1 = v / R ` non plus.
Mathématiquement on peut le confirmer en calculant le rayon de courbure avec la formule adéquate, mais c'est un peu compliqué.
On s'apercevrait que le rayon dépend de la position du point sur l'ellipse.
`=> ` ` color(blue) ("L'équation générale trouvée pour la trajectoire ne convient donc pas forcément")` pour que le vecteur ` (L_x, L_y) ` ait une vitesse
angulaire uniforme et constante ` omega ` autour de l'origine.
J' écris ` omega1 ` intentionnellement, car si on faisait le calcul on ne retrouverait pas le ` omega ` de notre équation de la trajectoire
dans le cas général.
Soit l'équation de la trajectoire :
` x(t) = R cos omega t `
` y(t) = R sin omega t `
on obtient, pour calculer la vitesse :
` x^'(t) = -R\ omega sin omega t `
` y^'(t) = R\ omega cos omega t `
et :
` v^2 = x^('2)(t) + y^('2)(t) `
` = (R omega)^2 (sin^2 omega t + cos^2 omega t) `
` = (R omega)^2 `
soit :
` v = R omega `
Comme la formule générale de la vitesse angulaire est :
` omega 1 = \frac{v}{R} `
on obtient :
` omega 1 = \frac{R omega}{R} `
` = omega = "Cte" `
Dans le cas du cercle on obtient bien ` omega 1 = omega ` , sinon dans le cas général la valeur de ` omega 1 ` trouvée aurait été
fonction de ` cos omega t \ \ ","\ \ sin omega t` et ` omega` .
Pour obtenir une vitesse angulaire ` omega ` constante, ` color(blue) ("il faut donc des trajectoires circulaires") ` avec les valeurs de A, B, C et D en conséquence.
Ce sont les explications complémentaires que je voulais apporter à ce paragraphe de la page 205.
Ci-dessous les deux manières d'obtenir un cercle à partir de l'équation générale :
1) ` R = A = 3 `
2) ` B = C = 4 `
` D = -A = -3 `
` R = sqrt(A^2 + B^2) = 5 ` comme indiqué dans la Remarque 2.