Essai de résolution de l'équation de la courbe de l’exercice 6.4 .
Position du problèmeVérification du 1er cas de trajectoireVérification du 2ème cas de trajectoireVérification du 3ème cas de trajectoireConclusionCourbe
Mais d'abord des remerciements à Mathieu Bivert.
Ce complément est directement le résultat d'une longue et fructueuse discussion où nous avons explorer de nombreux aspects
de ce problème.
L'équation du mouvement recherché trouvé dans l'exercice 6.4 répond donc au système linéaire suivant
des équations en coordonnées polaires :
` color(blue) ( { (\ \ \ ddot R, = R(dot theta - omega)^2), ( R ddot theta, = 2 dot(R) (omega - dot(theta) ) ) :} ) `
Ce système est non linéaire car il y a des termes au carré et nous ne savons pas le résoudre.
Par contre comme il s'agit d'un mouvement simple (la trajectoire de la particule suivie par les deux systèmes est une droite),
posons le problème à l'aide d'une figure géométrique et voyons ce que nous pouvons en tirer.
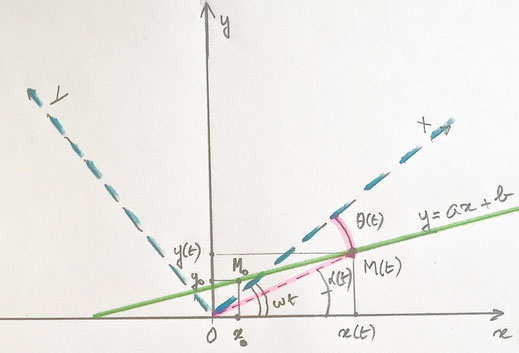
1) Position du problème :
1.1) Déplacement de la particule :
La particule en ` M ` se déplace sur la droite ` y = ax + b `
à la vitesse ` v ` constante .
Le vecteur ` vec(v) ` a pour composantes ` (v_x, v_y) ` avec :
` v_x = v cos beta `
` = v cos(arctan a) `
` v_y = v sin beta `
` = v sin(arctan a) `
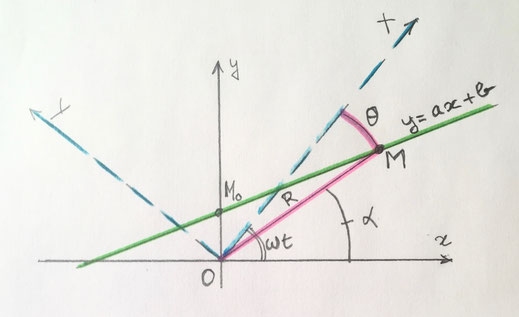
1.2) Position de la particule dans le référentiel tournant ` XOY ` :
En coordonnées polaires nous avons ` R = OM(t) ` .
A partir de la figure, on peut dire :
` R^2(t) = x^2(t) + y^2(t) ` avec
` x(t) = x_0 + v_xt `
` = x_0 + vt cos (arctan a) `
` y(t) = y_0 + v_yt `
` = y_0 + vt sin (arctan a) `
et :
` theta = omega t - alpha(t) ` avec ` alpha(t) = arctan (frac{y(t)}{x(t)})`
1.3) La trajectoire de la particule en ` M ` vue du référentiel ` XOY ` en coordonnées polaires pourrait être donnée par :
`color(brown) ( { ( R , = sqrt( (x_0 + vt cos (arctan a))^2 + (y_0 + vt sin (arctan a))^2 ) ), (theta , = omega t - arctan( class{cmjx-lg} { (y_0 + vt sin (arctan a)) / (x_0 + vt cos (arctan a)) } ) ) :} )`
avec ` omega, a, v ` comme constantes et ` t ` comme variable.
Il faut maintenant le vérifier en prenant trois cas, du plus simple au plus général, géométriquement et mathématiquement parlant.
2) Premier cas : ` y = ax ` , ` M_0(0,0) ` .
On a ` x_0=0, y_0=0 ` ainsi que ` alpha = hat(MOx)` fixe.
Ce qui donne :
` R = sqrt( (vt cos (arctan a))^2 + (vt sin (arctan a))^2 ) `
` = sqrt( v^2t^2 (cos^2(arctan a) + sin^2(arctan a) ) ) `
` = vt `
` theta = omega t - arctan( frac{vt sin (arctan a)}{vt cos (arctan a)} )`
` = omega t - arctan( frac{vt sin (arctan a)}{vt cos (arctan a)} )`
` = omega t - arctan( tan(arctan a) ) `
` = omega t - arctan a `
Calculons les valeurs ` R, dot(R), ddot(R) ` et ` theta, dot(theta), ddot(theta) ` pour les reporter dans le système d'équations différentielles.
Nous obtenons :
` R = vt `
` dot(R) = v `
` ddot(R) = 0 `
et :
` theta = omega t - alpha ` avec ` alpha = Cte `
` dot(theta) = omega `
` ddot(theta) = 0 `
ce qui donne pour la 1ère équation à vérifier :
` color(blue) (ddot(R) = (dot(theta) - omega)^2 R )`
` 0\ "=?"\ ( omega - omega) v `
` 0\ "=?"\ 0 ` ` => ` ` color(blue) ("OUI l'égalité n°1 est vérifiée pour le 1er cas.") `
et pour la 2ème :
` color(blue)(R ddot(theta) = (omega - dot(theta))2 dot(R) )`
` 0\ "=?"\ ( omega - omega) v `
` 0\ "=?"\ 0 ` ` => ` ` color(blue) ("OUI l'égalité n°2 est vérifiée aussi pour ce 1er cas.") `
Pour ce premier cas, les équations différentielles sont vérifiées.
3) Deuxième cas : ` y = b, a = 0, M_0(0,b) ` .
On a ` x_0 = 0, y_0 = b, v_x = v, v_y = 0 `
ce qui donne :
` x(t) = x_0 + vt cos (arctan a) `
` = 0 + vt cos(0) `
` = vt `
` y(t) = y_0 + vt sin (arctan a) `
` = b + vt sin(0) `
` = b = Cte `
` R = sqrt((vt)^2 + b^2) `
` tan alpha = frac{y(t)}{x(t)} `
` = frac{b}{vt}`
` theta = omega t - arctan( frac{b}{vt} )`
Calculons les valeurs ` R, dot(R), ddot(R) ` et ` theta, dot(theta), ddot(theta) ` pour les reporter dans le système d'équations différentielles.
Nous obtenons :
` R = sqrt((vt)^2 + b^2) `
` dot(R) = frac{2 v^2 t}{2 sqrt((vt)^2 + b^2)} = frac{v^2 t}{sqrt((vt)^2 + b^2)}`
` = frac{v^2 t}{R} `
Comme ` dot(R) ` est de la forme ` frac{x}{y} ` alors ` ddot(R) ` est de la forme ` frac{dot(x) y - dot(y) x}{y^2} `
avec:
` x = v^2 t, \ dot(x) = v^2 `
` y = R, \ dot(y) = dot(R) `
d'où :
` ddot(R) = frac{v^2 R - dot(R) v^2t}{R^2} `
et :
` theta = omega t - arctan( frac{b}{vt} ) `
` frac{d}{du} (arctan u) = frac{u^'}{1 + u^2} `
` dot(theta) = w - d/(dt)arctan (b/(vt) ) `
` d/(dt)arctan (b/(vt)) = class{cmjx-lg}{( - b / (vt^2) ) / (1 + (b / (vt))^2 ) } `
` = class{cmjx-lg} { ( - b / (vt^2) ) / ( ( v^2t^2 + b^2) / ((vt)^2) ) }` ` = class{cmjx-lg}{( - (bv) / (cancel(v^2t^2) )) / ( ( v^2t^2 + b^2) / (cancel ((vt)^2) ) }`
` = - (bv) / ( ( v^2t^2 + b^2) `
d'où :
` dot(theta) = omega - (- (bv) / ( ( v^2t^2 + b^2) )) = omega + (bv) / ( ( v^2t^2 + b^2)`
` = omega + (bv) / R^2 `
` ddot(theta) = bv\ d/(dt)(1 / R^2) `
` = bv \ ("-2" dot(R) / R )`
` = -2\ bv\ dot(R) / R `
ce qui donne pour la 1ère équation à vérifier :
` color(blue) (ddot(R) = (dot(theta) - omega)^2 R )` en reportant simultanément les valeurs trouvées ci-dessus de chaque côté du signe ` = ` .
` frac {v^2 R - dot(R) v^2 t}{R^2} \ \ \ \ "=?"\ ( omega + frac{bv}{R^2} - omega)^2 R `
` frac{v^2 R - frac{v^2 t}{R} v^2 t }{R^2} \ \ "=?"\ frac{ (bv)^2 }{R^4} R `
` frac{ v^2 R^2 - v^4 t^2}{ R^3 } \ "=?"\ frac{ (bv)^2 }{R^3} `
` frac{ v^2(cancel(v^2t^2) + b^2) - cancel(v^4t^2)}{ R^3 } \ "=?"\ frac{ (bv)^2 }{R^3} `
` frac{ b^2 v^2 }{R^3} \ "=?"\ frac{ (bv)^2 }{R^3} ` ` color(blue) ("OUI l'égalité n°1 est vérifiée pour le 2ème cas.") `
Et maintenant la 2ème :
` color(blue) ( R ddot(theta) = 2 dot(R)(omega - dot(theta)) )`
` R frac{"-2" b v^3 t}{R^4}\ "=?"\ 2 frac{v^2 t}{R} (cancel(omega) - ( cancel(omega) + frac{bv}{R^2} )) `
` frac{-2\ b v^3 t}{R^3}\ "=?"\ -2 frac{b v^3 t}{R^3} ` ` color(blue) ("OUI l'égalité n°2 est vérifiée aussi pour le 2ème cas.") `
4) Troisième cas : ` y = ax + b,\ a != 0,\ M_0(0,b) ` .
On a ` x_0 = 0, y_0 = b,\ v_x = v cos(arctan a), v_y = v sin(arctan a) `
ce qui donne :
` x(t) = x_0 + vt cos (arctan a) `
` = vt cos(arctan a) `
` y(t) = y_0 + vt sin (arctan a) `
` = b + vt sin(arctan a) `
` R = sqrt((vt cos(arctan a))^2 + (b + vt sin(arctan a))^2) `
` tan alpha = frac{y(t)}{x(t)} `
` = frac{b + vt sin(arctan a)}{vt cos(arctan a)}`
` theta = omega t - alpha `
` theta = omega t - arctan(frac{b + vt sin(arctan a)}{vt cos(arctan a)} )`
Calculons comme habituellement les valeurs ` R, dot(R), ddot(R) ` et ` theta, dot(theta), ddot(theta) ` pour les reporter dans le système d'équations différentielles.
Posons cependant ` aa = arctan a = "Cte" ` pour simplifier les calculs.
` R = sqrt((vt cos(arctan a))^2 + (b + vt sin(arctan a))^2) `
` R = sqrt((vt cos(aa))^2 + (b + vt sin(aa))^2) `
` dot(R) = frac{2 v cos(aa) vt cos(aa) + 2v sin(aa) (b + vt sin(aa))}{2 sqrt((vt cos(aa))^2 + (b + vt sin(aa))^2)} `
` = frac{2 v^2 t cos^2(aa) + 2bv sin(aa) + 2v^2 t sin^2(aa)}{2R} ` ` = frac{2 v^2 t (cos^2(aa) + sin^2(aa)) + 2bv sin(aa) }{2R} `
` = frac{cancel(2) v^2 t + cancel(2) bv sin(aa)}{cancel(2) R} `
` = frac{v^2 t + bv sin(aa)}{R} `
Comme ` dot(R) ` est de la forme ` frac{u_1}{v_1} ` ,
alors ` ddot(R) ` va être de la forme ` frac{u_1^' v_1 - v_1^'u_1}{v_1^2} `
avec :
` u_1 = v^2 t + bv sin(aa) ` ` u_1^' = v^2 `
` v_1 = R ` `v_1^' = dot(R) `
soit :
` ddot(R) = frac{v^2R - dot(R)(v^2 t + bv sin(aa))}{R^2} `
et maintenant :
` theta = omega t - arctan(frac{b + vt sin(arctan a)}{vt cos(arctan a)} )`
` theta = omega t - arctan(frac{b + vt sin(aa)}{vt cos(aa)} )`
` dot(theta) = omega - frac{d}{dt}arctan (frac{b + vt sin(aa)}{vt cos(aa)}) `
Comme précédemment ` frac{d}{dt}arctan u = frac{u^'}{1 + u^2} `
avec ` u ` de la forme ` frac{u_1}{v_1} `
et donc ` u^' ` de la forme ` frac{u_1^' v_1 - v_1^' u_1}{v_1^2} ` ,
les valeurs étant :
` u_1 = b + vt sin(aa) ` ` u_1^' = v sin(aa) `
` v_1 = vt cos(aa) ` ` v_1^' = v cos(aa) `
soit :
` u^' = frac{v sin(aa) vt cos(aa) - v cos(aa) (b + vt sin(aa))}{ (vt cos(aa))^2} `
` = frac{cancel(v^2 t sin(aa) cos(aa) ) - bv cos(aa) - cancel(v^2 t cos(aa) sin(aa) )}{(vt cos(aa))^2} `
` = frac{-b cancel(v) cancel(cos(aa))}{v^(cancel(2)) t^2 cos^(cancel(2))(aa)} `
` = frac{-b}{v t^2 cos(aa)} `
En revenant à notre ` frac{d}{dt}arctan u = frac{u^'}{1 + u^2} ` , on peut écrire maintenant avec ` u = frac{b + vt sin(aa)}{vt cos(aa)} ` :
` frac{d}{dt}arctan u = class{cmjx-lg}{frac{ frac{-b}{v t^2 cos(aa)} }{1 + (frac{b + vt sin(aa)}{vt cos(aa)} )^2 } }`
` = class{cmjx-lg}{frac{ frac{-b xx v cos(aa)}{cancel(v t^2 cos(aa) xx v cos(aa) )} }{ frac{ v^2 t^2 cos^2(aa) + (b + vt sin(aa))^2 }{cancel(v^2 t^2 cos^2(aa) )} } }`
` = frac{-bv cos(aa)}{R^2} `
soit :
` dot(theta) = omega - frac{-bv cos(aa)}{R^2} `
` = omega + frac{bv cos(aa)}{R^2} `
` ddot(theta) = bv cos(aa) frac{d}{dt} frac{dot(1)}{R^2}`
` = bv cos(aa) ("-2") frac{dot(R)}{R^3}`
` = -2\ bv cos(aa) frac{dot(R)}{R^3}`
ce qui donne pour la 1ère équation à vérifier :
` color(blue) (ddot(R) = (dot(theta) - omega)^2 R )`
` frac{v^2R - dot(R)(v^2 t + bv sin(aa))}{R^2} \ "=?" \ (cancel(omega) + frac{bv cos(aa)}{R^2} - cancel(omega) )^2 R `
` frac{v^2R - frac{v^2 t + bv sin(aa)}{R}(v^2 t + bv sin(aa))}{R^2}\ "=?"\ frac{(bv cos(aa))^2}{R^3} `
` frac{v^2 R^2 - (v^2 t + bv sin(aa))^2}{R^3} \ "=?"\ frac{(bv cos(aa))^2}{R^3} `
` frac{v^2 ( (vt cos(aa))^2 + ( b + vt sin(aa) )^2) - (v^2 t + bv sin(aa))^2 }{cancel(R^3)}\ "=?"\ frac{(bv cos(aa))^2}{cancel(R^3)} `
` v^2 color(brown) ( (vt cos(aa))^2 ) + v^2(b^2 + 2 bvt sin(aa) + color(brown) (v^2 t^2 sin^2(aa)) ) - (v^4 t^2 + 2bv^3 t sin (aa) + b^2 v^2 sin^2(aa) )\ "=?"\ (bv cos(aa))^2 `
` v^4 t^2 (color(brown) (cos^2(aa) + sin^2(aa)) ) + b^2 v^2 + cancel(2 v^3 bt sin(aa) ) - v^4 t^2 - cancel(2 b v^3 t sin(aa) ) - b^2 v^2 sin^2(aa) \ "=?"\ (bv cos(aa))^2 `
` cancel(v^4 t^2) + b^2 v^2 - cancel(v^4 t^2) - b^2 v^2 sin^2(aa) \ "=?"\ (bv cos(aa))^2 `
` b^2 v^2 (1 - sin^2(aa) ) \ "=?"\ (bv cos(aa))^2 `
` b^2 v^2 cos^2(aa)\ "=?"\ (bv cos(aa))^2 ` ` color(blue) ("OUI l'égalité n°1 est vérifiée pour le 3ème cas. Ouf !") `
Et maintenant la 2ème :
` color(blue) ( R ddot(theta) = 2 dot(R)(omega - dot(theta)) )`
` cancel(R) frac{bv cos(aa)(-2 dot(R)) }{R^(cancel(3)2)}\ "=?"\ (cancel(omega) -(cancel(omega) + frac{bv cos(aa) }{R^2})) 2 dot(R) `
` frac{bv cos(aa)(-2 cancel(dot(R)) ) }{R^2}\ "=?"\ (- frac{bv cos(aa) }{R^2}) 2 cancel(dot(R)) `
` frac{-2 bv cos(aa)}{R^2}\ "=?"\ -2 frac{bv cos(aa) }{R^2} ` ` color(blue) ("OUI l'égalité n°2 est vérifiée pour le 3ème cas.") `
5) Conclusion .
Les trois cas correspondant à la proposition de solution ont été vérifiés.
On peut donc conclure que pour le système d'équations non linéaires en coordonnées polaires :
` color(blue) ( { (\ \ \ ddot R, = R(dot theta - omega)^2), ( R ddot theta, = 2 dot(R) (omega - dot(theta) ) ) :} ) `
la solution :
` color(blue) ( { ( R , = sqrt( (x_0 + vt cos (arctan a))^2 + (y_0 + vt sin (arctan a))^2 ) ), (theta , = omega t - arctan( class{cmjx-lg} { (y_0 + vt sin (arctan a)) / (x_0 + vt cos (arctan a)) } ) ) :} )`
avec ` omega, a, v, x_0, y_0 ` comme constantes et ` t ` comme variable,
est ` color(blue) ("valide") ` pour la description de la trajectoire d'une particule se déplaçant sur une ligne droite de pente ` a ` à la vitesse ` v ` , et
à partir du point ` M(x_0, y_0) ` , vue par un système de référence tournant à la vitesse angulaire ` omega ` par rapport à un autre système de
coordonnées ` xOy ` considéré comme fixe.
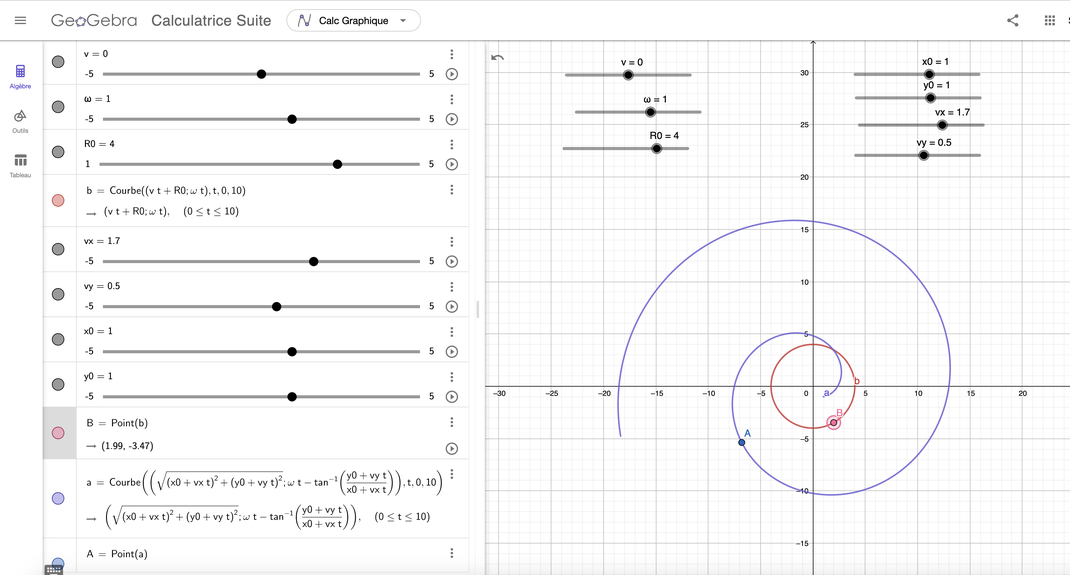
6) Courbe .
La courbe générale en ` color(blue) ("bleu") ` a la forme d'une spirale.
La courbe particulière en ` color(red) ("rouge") ` est un cercle.
Elle correspond au point ` M_0 ` fixe :
` v_x = v_y = v = 0 `
` R_0 = sqrt(x_0^2 + y_0^2) `